使用LabVIEW与3D相机开发一个高精度表面检测系统。该系统能够实时获取三维图像,进行精细的表面分析,广泛应用于工业质量控制、自动化检测和科学研究等领域。通过真实案例,展示开发过程中的关键步骤、挑战及解决方案,确保系统的高性能和可靠性。
随着工业自动化和智能制造的发展,精密表面检测在质量控制中的重要性日益凸显。3D相机因其能够获取高精度的三维图像,在表面检测中具有独特优势。本文将介绍如何结合LabVIEW与3D相机开发一个高精度表面检测系统,以实际案例为基础,详细阐述系统开发的各个环节。
项目背景
需要开发一套自动化表面检测系统,用于检测生产线上的金属零件表面缺陷。传统的2D检测方法无法满足其高精度、高速度的要求,因此决定采用3D相机获取三维表面数据,并利用LabVIEW进行数据处理和分析。
项目需求:
-
高精度检测:检测精度达到微米级别,能够识别微小的表面缺陷。
-
高速处理:实时处理和分析大量三维数据,确保生产线的高效运行。
-
自动化控制:系统能够自动识别缺陷并触发相应的处理机制。
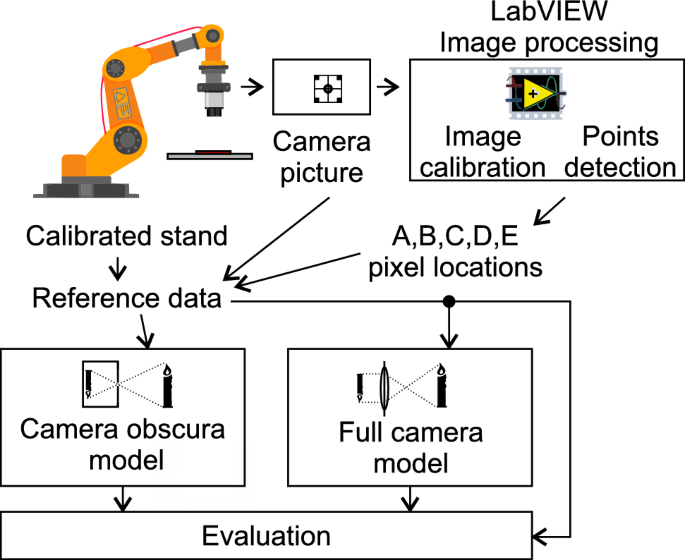
系统架构设计
硬件选型:
-
3D相机:选择一款高分辨率、高帧率的3D相机,能够在高速生产线上捕捉到清晰的三维图像。
-
控制计算机:配置高性能计算机,确保数据处理和分析的速度。
-
运动控制器:用于控制相机的位置和移动,实现多角度、多位置的拍摄。
软件架构:
-
LabVIEW开发环境:利用LabVIEW的图形化编程特点,快速开发和调试系统功能。
-
数据采集模块:通过LabVIEW与3D相机的接口,实时获取三维图像数据。
-
图像处理模块:使用LabVIEW的图像处理库,进行缺陷检测和分析。
-
控制模块:集成运动控制器,实现相机和检测目标的精确移动。
-
用户界面:设计友好的人机界面,便于操作和监控系统状态。
系统开发
1. 3D相机数据采集
-
硬件接口配置:通过LabVIEW的硬件接口配置,连接3D相机与控制计算机。确保相机驱动和软件包正确安装,使LabVIEW能够识别并控制相机。
-
数据采集程序设计:使用LabVIEW的IMAQdx模块,编写数据采集程序,实时获取3D相机捕捉的三维图像数据。设置相机参数(如分辨率、帧率、曝光时间等)以优化图像质量。
2. 图像处理和缺陷检测
-
数据预处理:对采集到的三维图像数据进行预处理,包括去噪、滤波和对比度增强,确保后续处理的准确性。使用LabVIEW的图像处理函数,如Gaussian滤波、边缘检测等,优化图像质量。
-
缺陷检测算法:开发缺陷检测算法,识别三维图像中的表面缺陷。采用形态学处理、阈值分割和特征提取等方法,准确定位和分类缺陷。利用LabVIEW的Vision Development Module,实现这些图像处理和分析功能。
-
算法优化:对缺陷检测算法进行优化,提升处理速度和准确性。采用多线程处理和并行计算,充分利用计算机的多核性能,提高数据处理效率。
3. 自动化控制
-
运动控制器集成:将运动控制器集成到LabVIEW系统中,实现相机和检测目标的精确移动。通过LabVIEW的运动控制模块(如NI-Motion),编写运动控制程序,设置运动轨迹和速度。
-
自动化检测流程:设计自动化检测流程,包括相机移动、图像采集、数据处理和缺陷识别。确保系统能够连续、稳定地运行,满足生产线的高效要求。
4. 用户界面设计
-
界面布局:设计用户友好的界面布局,显示实时三维图像、检测结果和系统状态。使用LabVIEW的前面板设计工具,创建直观的操作界面。
-
交互功能:实现丰富的交互功能,包括参数调整、手动控制和报警提示。确保操作人员能够方便地操作和监控系统,及时处理检测到的缺陷。
5. 系统测试与优化
-
测试环境搭建:搭建测试环境,模拟实际生产线的运行情况,验证系统的性能和稳定性。通过实验数据,评估系统的检测精度和速度。
-
性能优化:根据测试结果,对系统进行性能优化,提升检测速度和精度。调整相机参数、优化算法和改进控制策略,确保系统在各种条件下都能稳定运行。
-
故障排查与解决:识别和解决系统运行中的故障和问题,确保系统的可靠性。通过日志记录和故障诊断工具,快速定位和解决问题。
案例分析
项目实施过程:公司在实施过程中,采用了上述系统架构和开发步骤,成功开发了一套高精度表面检测系统。项目团队由硬件工程师、软件开发人员和质量控制专家组成,协同工作,确保系统的高性能和高可靠性。
挑战与解决方案:
-
高精度图像采集:挑战:在高速生产线上,获取清晰、稳定的三维图像。解决方案:优化相机参数,使用高性能运动控制器,确保相机在高速移动时仍能获取高质量图像。
-
实时数据处理:挑战:处理和分析大量三维数据,实时识别表面缺陷。解决方案:采用并行计算和多线程处理,提升数据处理速度;优化图像处理算法,提高检测准确性。
-
系统稳定性:挑战:确保系统在长时间运行中保持稳定,避免数据丢失和系统崩溃。解决方案:进行全面的系统测试和性能优化,建立完善的故障检测和恢复机制。
-
用户界面设计:挑战:设计简洁、易用的用户界面,便于操作和监控系统状态。解决方案:使用LabVIEW的前面板设计工具,创建直观的操作界面;提供详细的操作指南和培训,提高操作人员的使用效率。
系统应用效果:经过一段时间的实际应用,该表面检测系统在生产线上的表现优异,显著提升了产品质量控制的效率和精度。具体效果如下:
-
检测精度:系统能够识别微米级别的表面缺陷,检测精度大幅提升。
-
检测速度:实时处理和分析三维数据,满足生产线的高速要求。
-
自动化程度:系统实现了全自动化检测,减少了人工干预和操作,提高了生产效率。
-
用户体验:简洁、易用的用户界面,操作人员能够方便地控制和监控系统,及时处理检测到的缺陷。
总结
介绍了使用LabVIEW与3D相机开发高精度表面检测系统的案例,涵盖系统架构设计、开发过程、挑战与解决方案等方面。通过该案例,展示了LabVIEW在工业自动化检测中的强大功能和优势。未来,随着技术的不断发展,LabVIEW和3D相机的结合将为更多领域的高精度检测提供有力支持。